Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
Obtenga beneficios adicionales
Aún no tiene una suscripción a Virtual Pro?
Para acceder a este contenido se requiere una suscripción
En este trabajo se propone la captura de movimiento humano para generar movimientos de la pierna derecha en fase de oscilación de un robot bípedorestringido al plano sagital. Estos movimientos son definidos mediante funciones de tiempo que representan las posiciones angulares deseadas para las articulaciones involucradas. La captura de movimiento realiza con un sensor KinectTM y a partir de los datos obtenidos se generaron trayectorias articulares para controlar la pierna derecha del robot en la fase de balanceo. La ley de control propuesta es una estrategia híbrida; la primera estrategia se basa en un control por par calculado para realizar un seguimiento de trayectorias de referencia, y la segunda estrategia se basa en un control por escalado de tiempo para garantizar el equilibrio del robot. Este trabajo es un estudio preliminar para generar trayectorias de robots humanoides a partir de captura de movimiento.
1 INTRODUCCIÓN
La naturaleza es una fuente de inspiración para la robótica. El diseńo de robots bípedos se inspira en la movilidad funcional del cuerpo humano, sin embargo, el número de grados de libertad (DoF), el rango de movimiento y la velocidad de un robot bípedo real son mucho más limitados en comparación con los humanos. La elección del número de DoF para cada articulación es importante. El enfoque consiste en analizar la estructura del robot desde tres planos principales: el sagital, el frontal y el transversal. El movimiento de la marcha tiene lugar principalmente en el plano sagital; todos los bípedos tienen el mayor número de articulaciones importantes en este plano [1].
El modelado, seguimiento y comprensión del movimiento humano basado en la captura de movimiento es un campo de investigación que ha resurgido durante la última década, con la aparición de aplicaciones en las ciencias del deporte, la medicina, la biomecánica, la animación (juegos en línea), la monitorización y la seguridad [2]. El desarrollo de estas solicitudes está anclado en los avances de la visión artificial y la biomecánica. Aunque estas áreas de investigación suelen tratarse por separado, el análisis de las metodologías de movimiento humano requiere la integración de la visión por ordenador y el modelado del cuerpo humano como sistema mecánico que mejora la solidez de este enfoque [3].
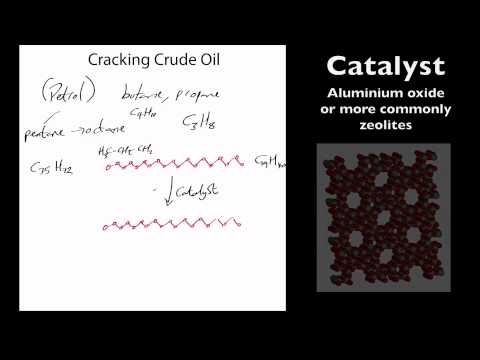
La captura de movimiento es el proceso de grabar un evento de movimiento en vivo y traducirlo en términos matemáticos utilizables mediante el seguimiento de una serie de puntos clave en el espacio a lo largo del tiempo y su combinación para obtener una única representación tridimensional (3D) de la actuación; [4]. El sujeto capturado puede ser cualquier cosa que exista en el mundo real y tenga movimiento; los puntos clave son las zonas que mejor representan el movimiento de las diferentes partes móviles del sujeto. Estos puntos deben ser puntos de pivote o conexiones entre partes rígidas del sujeto.
Esta es una versión de prueba de citación de documentos de la Biblioteca Virtual Pro. Puede contener errores. Lo invitamos a consultar los manuales de citación de las respectivas fuentes.
Artículo:
Una comparación de desempeńo del control Lineal y no lineal de un motor de corriente continua
Artículo:
Una antena de banda ancha polarizada circularmente cargada con una banda metálica en forma de Y para una aplicación en la banda L
Artículo:
Enfoque lineal para determinar los parámetros óptimos de un localizador de fallas basado en MSV
Artículo:
Una antena cuasi-Yagi compacta con alta ganancia mediante el empleo de brazos doblados y resonadores de anillo dividido
Artículo:
Coderants: método de recomendación basado en la búsqueda colaborativa y las colonias de hormigas. Aplicado a la reutilización del código fuente abierto
Artículo:
Implementación de una propuesta de aprendizaje significativo de la cinemática a través de la resolución de problemas
Artículo:
Calidad sanitaria sostenible y satisfacción laboral a través de la cultura organizativa: Enfoques y resultados
Artículo:
Un modelo de gestión de inventarios basado en estrategia competitiva
Showroom:
Columna de adsorción de lecho fijo
Virtual Pro es un portal virtual de formación, investigación y comunicación especializado en procesos industriales.

ďż˝ 2021, Virtual Pro ďż˝, una marca de Grupo INGCO. Todos los derechos reservados